













Product Detail






Specification
| Overall Specifications | |
| Input voltage | 14.8V~25.2V |
| Dynamic current | 1000~1500mA @ 16V |
| Power consumption | Average 16W, Max 24W |
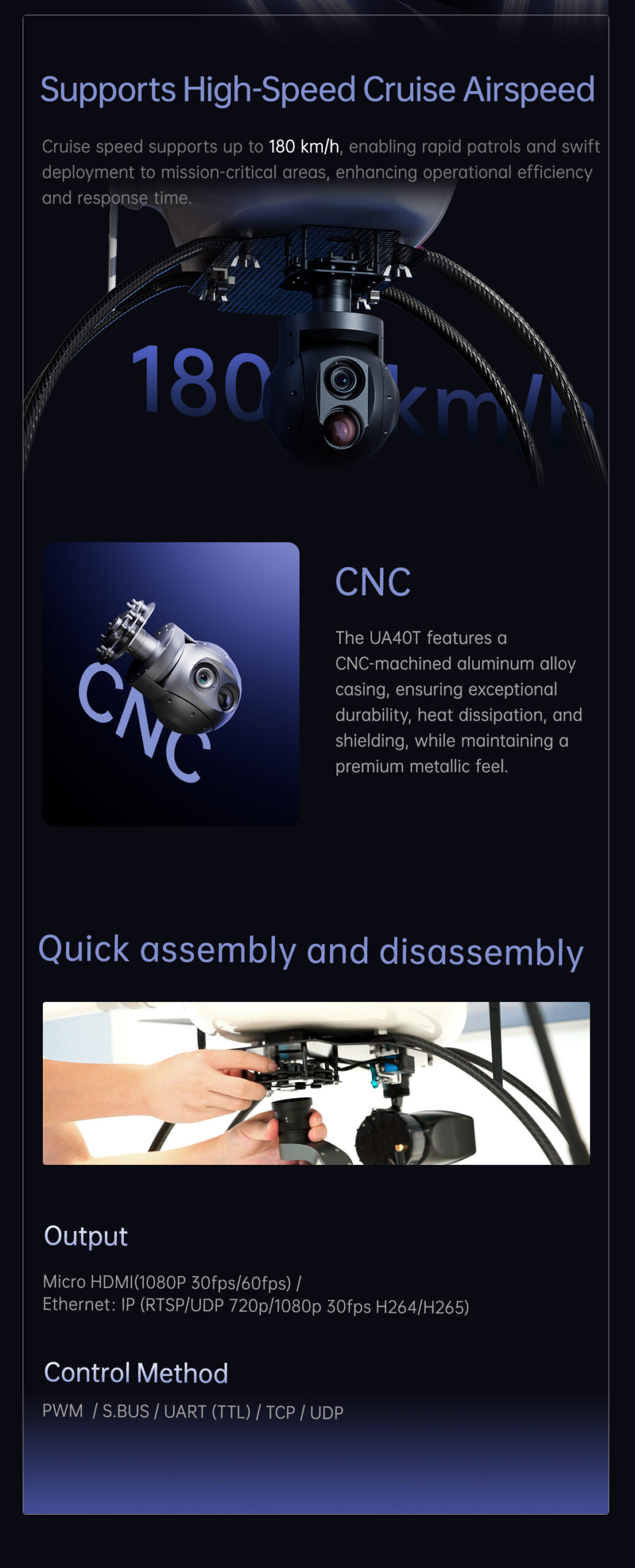
| Video Output (optional) | Micro HDMI(1080P 30fps/60fps) / Ethernet:IP (RTSP/UDP 720p/1080p 30fps H264/H265) |
| Control method | PWM / S.BUS / UART (TTL) / TCP / UDP |
| IP Rating | IP4X |
| Working environment temp. | -20℃ ~ +50℃ |
| Local-storage | TF card (Up to 256G,class 10, FAT32) |
| Picture storage format in TF card | JPG(1920*1080) |
| Video storage format in TF card | MP4(1080P@30fps) |
| Product Weight | about 1076g |
| Product Dimensions | 140*136*213.2mm |
| Gimbal Spec | |
| Mechanical Range | Pitch/Tilt:-40°(Up)~130°(Down), Yaw/Pan: ±300° / ±360°*N (IP output version) |
| Controllable Range | Pitch/Tilt: -30°(Up)~125°(Down), Yaw/Pan: ±290° / ±360°*N (IP output version) |
| Vibration angle | Pitch/Yaw: ±0.02° |
| One-key to center | √ |
| EO Camera spec | |
| Imager Sensor | 1/2.8″ CMOS Sensor |
| Picture quality | Full HD 1080 (1920*1080) |
| Effective pixel | 2.13MP |
| Lens optical zoom | 40x, F=4.25~170mm |
| Digital zoom | Off / MAX x2 ~ x32 |
| Min object distance | 0.1 / 1.5 / 3.0 / 5.0 / 10.0 m |
| Angle of View (D, H, V) | Wide: 73.80° / 66.35° / 39.98° |
| Tele: 2.16° / 1.90° / 1.11° | |
| AF Mode | Auto / Manual |
| Iris | Close ~ F1.6 |
| Shutter speed | 1/1 ~ 1/30,000 sec |
| Sync system | Internal |
| S/N ratio | more than 50dB |
| Min illumination | Color(1/30s, 79.5dB) : 0.01 lux , BW(1/30s, 79.5dB) : 0.002 lux |
| Color DSS(1/1s, 79.5dB) : 0.001 lux , BW DSS(1/1s, 79.5dB) : 0.0002 lux | |
| Exposure control | Auto / Iris. Priority / Shut. Priority / Manual |
| Gain Control(AGC) | 0 ~ 10 steps |
| White balance | Auto / Manual / Indoor / Outdoor |
| Back Light | Off / BLC / HLC / WDR |
| Defog | Off / Manual / Auto |
| IR Thermal Imager Spec | |
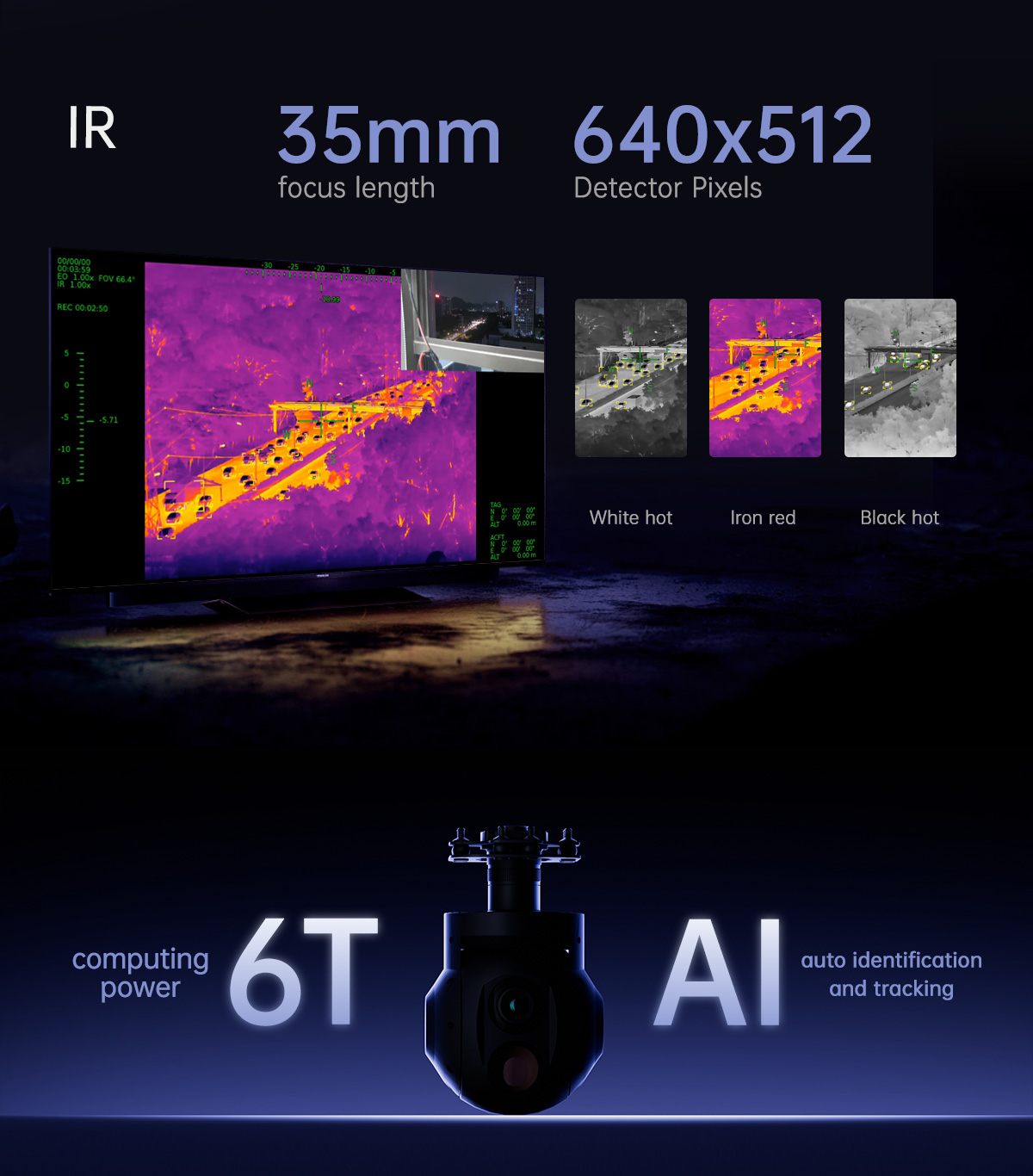
| Focus Length | 35mm |
| Horizontal FOV | 12.5° |
| Vertical FOV | 10.0° |
| Diagonal FOV | 16.0° |
| Detective Distance (Man: 1.8×0.5m) | 1458 meters |
| Recognize Distance (Man: 1.8×0.5m) | 365 meters |
| Verified Distance (Man: 1.8×0.5m) | 182 meters |
| Detective Distance (Car: 4.2×1.8m) | 4472 meters |
| Recognize Distance (Car: 4.2×1.8m) | 1118 meters |
| Verified Distance (Car: 4.2×1.8m) | 559 meters |
| Working mode | Uncooled VOx long wave (8μm~14μm) thermal imager |
| Detector pixel | 640*512 |
| Pixel pitch | 12μm |
| Focusing method | Athermal prime lens |
| NETD | ≤50mK@25℃,F#1.0 |
| Color palette | White hot,Black hot, Iron Red |
| Digital zoom | 1x ~ 8x |
| Radiometric function(optional) | Thermometry measuring mode:point anywhere measurement, selected box measurement |
| Thermometry range optional:-20℃~+150℃, +100℃~+550℃ | |
| Thermometry accuracy: ±3℃ or +3% of reading (whichever is greater) @ ambient temperature -20℃~60℃ | |
| Camera Object Tracking | |
| Update rate of deviation pixel | 30Hz |
| Output delay of deviation pixel | <30ms |
| Minimum object contrast | 5% |
| SNR | 4 |
| Minimum object size | 16*16 pixel |
| Maximum object size | 256*256 pixel |
| Tracking speed | ±48 pixel/frame |
| Object memory time | 100 frames |
| AI auto-zoom | Yes |
| Camera AI Performance | |
| TOPS | 6T |
| Targets type | Car and human |
| Simultaneous detection quantity | ≥ 10 targets |
| Min contrast ratio | 5% |
| Min target size | 5×5 pixel |
| Car detection rate | ≥85% |
| False alarm rate | ≤10% |
| Features | |
| OSD | Display the gimbal’s yaw and pitch angle, magnification, card recording duration, aircraft GPS and altitude, date and time |
| Geotagging | Display time and GPS coordinate in picture exif |
| Card reading online | HTTP read pictures or videos |
| KLV (UDP) | Card recording or Viewlink video playback |
| ArduPilot / PX4 | Support(Mavlink protocol ) Optional: Support Ardupilot Follow me feature |
| Video switching | EO+IR /IR+EO /EO /IR |
| Dual video stream output (optional) | Support(EO and IR two stream output, notes: unable to record once the dulal video stream output activated) |








