🚨 Industry Pain Points
In high-dynamic aerospace, UAV, and industrial motion systems, traditional inertial sensors often face critical limitations:
- Measurement drift caused by temperature variations
- Performance degradation under high vibration and shock
- Accuracy loss in high rotation or high acceleration environments
- Installation misalignment errors affecting system calibration
- Insufficient signal stability in complex operating conditions
These issues directly reduce navigation accuracy, control stability, and system reliability.
⚙ Product Advantages
This IMU is engineered with advanced MEMS technology and multi-layer compensation algorithms to overcome these challenges:
- ✔ High-precision MEMS gyroscope and accelerometer integration
- ✔ Built-in temperature sensor for real-time thermal compensation
- ✔ Anti-vibration and anti-shock structural design
- ✔ Flexible interconnection technology for improved durability
- ✔ Full-temperature calibration for stable performance across wide ranges
- ✔ Installation misalignment angle compensation
- ✔ Nonlinear error compensation algorithm for enhanced accuracy
- ✔ Stable output under high rotation, high overload, and high dynamic conditions
🚁 Product Applications
This high-performance IMU is widely used in demanding fields such as:
- UAV navigation and flight control systems
- Aerospace attitude and inertial navigation
- Autonomous vehicles and robotics
- Marine navigation and stabilization systems
- Industrial motion control and measurement systems
- High-dynamic testing platforms and simulation systems
⭐ Why Choose Us
- High-precision MEMS sensing technology
- Strong environmental adaptability (temperature, vibration, shock)
- Advanced multi-layer error compensation algorithms
- Reliable performance in extreme dynamic conditions
- Stable and continuous data output for mission-critical systems
- Designed for professional aerospace and industrial-grade applications
We provide robust inertial sensing solutions designed for accuracy, stability, and long-term reliability in complex operating environments.
❓ Frequently Asked Questions (FAQ)
Q1: Does the IMU support high-vibration environments?
Yes, it is designed with anti-vibration and anti-shock structural architecture for harsh conditions.
Q2: How does it maintain accuracy under temperature changes?
It uses full-temperature compensation algorithms to reduce thermal drift.
Q3: Can it work in high-dynamic motion conditions?
Yes, it is optimized for high rotation, high overload, and high dynamic environments.
Q4: Does it correct installation errors?
Yes, it includes installation misalignment angle compensation.
Q5: What improves its measurement stability?
A combination of nonlinear compensation, temperature correction, and structural vibration resistance ensures stable output.
| Parameter | unit | fundamental form | |
| gyroscope | Measurement range (customizable) | ° /s | X:±4000;Y/Z:±400 |
| Zero-level offset | ° /h | X:50;Y/Z:30 | |
| Zero-pitch instability (@ALLAN variance) | ° /h | ≤ 1 | |
| Zero offset stability (10-second smoothing, 1σ, room temperature) | ° /h | X:30;Y/Z:10 | |
| Zero bias repeatability | ° /h | 2 | |
| Zero bias error across the entire temperature range | ° /h | X: 35;Y/Z: 15 | |
| random walk | ° / √ h | 0.15 | |
| Zero-zero acceleration sensitivity | ° /h/g | 2 | |
| resolution ratio | ° /s | 0.0005 | |
| Output noise (half-maximum) | ° /s | X:0.35;Y/Z:0.15 | |
| tape width | Hz | 150 | |
| Nonlinear scaling factor | ppm | X:500;Y/Z:300 | |
| Scale factor repeatability | ppm | X:500;Y/Z:300 | |
| cross coupling | % | 0.2 | |
| Parameter | unit | I mould | |
| accelerometer | Measurement range (customizable) | g | ±50 |
| Zero-pitch instability (@ALLAN variance) | mg | X/Y:0.025;Z:0.03 | |
| Zero offset stability (10-second smoothing, 1σ, room temperature) | mg | 1 | |
| Zero bias repeatability | mg | 1 | |
| Zero bias error across the entire temperature range | mg | 6 | |
| random walk | m/s/ √ h | X/Y:0.03;Z:0.06 | |
| resolution ratio | mg | 0.1 | |
| tape width | Hz | 150 | |
| Scale factor repeatability | ppm | 300 | |
| cross coupling | % | 0.2 | |
| Parameter | unit | fundamental form | |
|
other |
Stabilization start time | s | 1.5 |
| Data update rate | Hz | 1000 | |
| voltage | V | 5 | |
| steady state power consumption | W | < 2 | |
| ripple wave | mV | 100 | |
| working temperature | ℃ | -40~80 | |
| storage temperature | ℃ | -55~105 | |
| weight | g | ≤ 120 | |
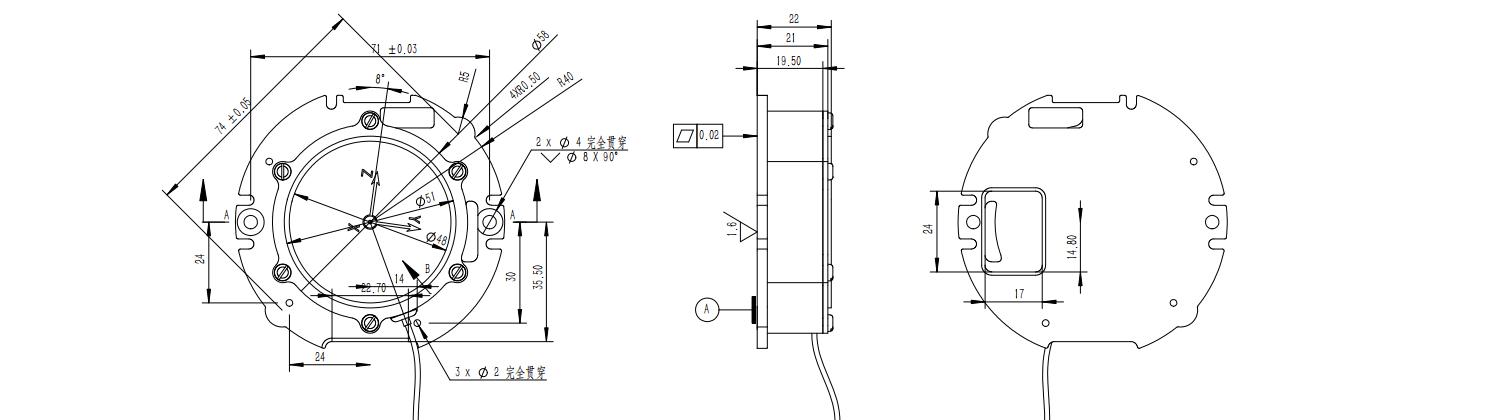
| size | mm | φ80*22 | |
| Interface | TTL | ||