🚨 Industry Pain Points
In high-precision navigation and control applications, users often face several challenges:
- Inaccurate positioning in GPS-denied or signal-interference environments
- Poor temperature stability affecting MEMS sensor accuracy
- Lack of reliable calibration leading to long-term drift
- Limited compatibility with existing navigation systems
- High cost of high-precision inertial navigation solutions
- Complex integration for UAV and autonomous platforms
These limitations can significantly impact system performance, operational reliability, and mission success.
⚙ Product Advantages
Our INS/GNSS navigation system is designed to overcome these industry challenges:
- ✔ Integrated MEMS inertial measurement unit (IMU)
- ✔ Built-in magnetometer, barometer, and GNSS receiver
- ✔ Proprietary INS/GNSS integrated navigation algorithm
- ✔ MEMS temperature error compensation technology
- ✔ System-level self-calibration and error compensation
- ✔ High-precision measurement of angular rate and acceleration
- ✔ Accurate heading, attitude, velocity, and position output
- ✔ Compatible with SBG Ellipse-N series products
- ✔ High stability and reliability in complex environments
🚁 Product Applications
This system is ideal for a wide range of professional applications:
- UAV flight control and navigation systems
- Autonomous vehicles and robotics
- Marine navigation and ship stabilization
- Surveying and mapping systems
- Industrial automation platforms
- Agricultural UAV and smart machinery
- Military and security applications
- Unmanned ground vehicles (UGV)
⭐ Why Choose Us
- Proprietary INS/GNSS fusion algorithm technology
- High-precision MEMS sensor integration
- Strong anti-interference capability
- Excellent temperature stability performance
- Seamless compatibility with existing systems
- Reliable performance in harsh environments
- Professional technical support and customization
We provide high-precision, reliable navigation solutions for demanding professional applications.
❓ Frequently Asked Questions (FAQ)
Q1: What sensors are integrated in this system?
The system integrates MEMS IMU, magnetometer, barometer, and GNSS receiver.
Q2: Does the system support GPS-denied environments?
Yes, it supports INS-based navigation for short-term GPS-denied operation.
Q3: Is temperature compensation included?
Yes, advanced MEMS temperature error compensation technology is built-in.
Q4: What data outputs are supported?
The system outputs angular rate, acceleration, heading, attitude, velocity, and position.
Q5: Is it compatible with other navigation systems?
Yes, it is fully compatible with SBG Ellipse-N series products.
| Parameter | unit | metric | |||
|
Aerial positioning accuracy (uniform magnetic field, RMS) |
path angle | Onboard aircraft, onboard ships | ° | 0.5 | |
| vehicle | ° | 0.2 | |||
| Uniform magnetic field, flight attitude mode | ° | 1.0 | |||
| Pitch Angle / Roll Angle | Onboard aircraft, onboard ships | ° | 0.2 | ||
| vehicle | ° | 0.15 | |||
| Position Precision (RMS) | horizontal | —— | m | 1.5(RTK:0.8cm+1ppm) | |
| altitude | —— | m | 3(RTK:1.5cm+1ppm) | ||
| Speed Precision (RMS) | m/s | 0.2 | |||
|
gyroscope |
measuring range | ° /s | ±500 | ||
| Zero offset stability (10-second smoothing, 1σ, room temperature) | ° /h | 10 | |||
| Full-temperature zero-drift variation (10-second smoothing, RMS, variable temperature) | ° /h | 60 | |||
| Zero bias repeatability | ° /h | 20 | |||
| random walk | ° / √ h | 0.5 | |||
| tape width | Hz | 250 | |||
| Nonlinear scaling factor | ppm | 200 | |||
| Scale factor repeatability | ppm | 200 | |||
| cross coupling | % | 0.2 | |||
|
accelerometer |
measuring range | g | ±10 | ||
| Zero offset stability (10-second smoothing, 1σ, room temperature) | mg | 0.05 | |||
| Full-temperature zero-drift variation (10-second smoothing, RMS, variable temperature) | mg | 2 | |||
| Zero bias repeatability | mg | 0.2 | |||
| tape width | Hz | 250 | |||
| Scale factor repeatability | ppm | 500 | |||
| cross coupling | % | 0.1 | |||
| magnetometer | measuring range | guass | ±2.5 | ||
| sensitivity | mguass/LSB | 0.1 | |||
| barometer | pressure limit | mbar | 300~1100 | ||
| fractional error | mbar | 2.5 | |||
|
satellite positioning |
frequency point |
—— |
BDS:B1IB2IB3IB1C B2a
GPS:LIC/A LIC L2P(W) L2CL5 GLONASS:L1L2 Galileo:E1 E5a E5b QZSS: L1 L2 L5 |
||
| cold boot | s | 20 | |||
| Data update rate | Hz | 100 (customizable) | |||
| voltage | V | 5~30 | |||
| power dissipation | W | ≤ 1.0 | |||
| working temperature | ℃ | -45~80 | |||
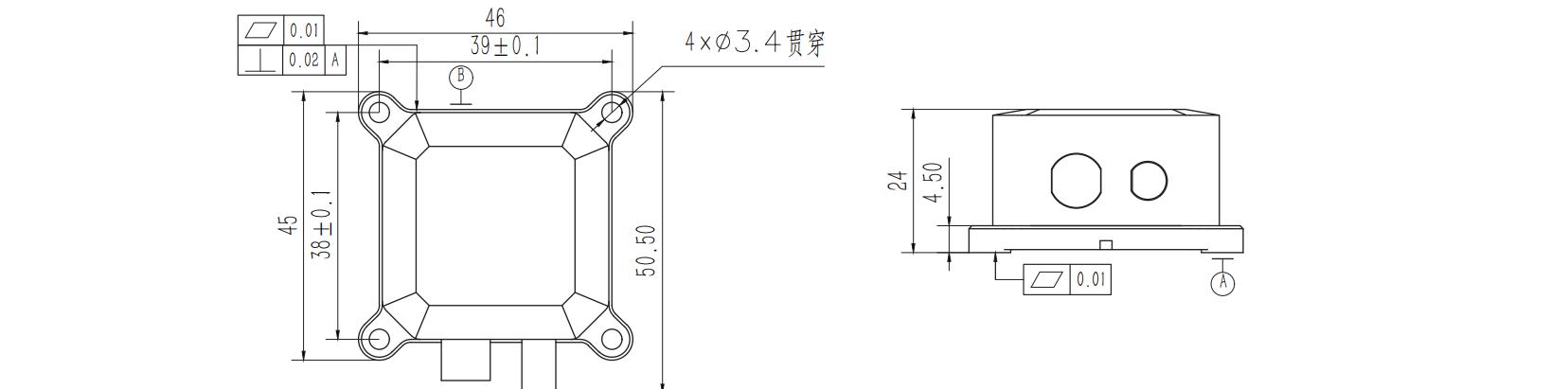
| size | mm | 45*46*24 | |||
| weight | g | ≤ 55 | |||
| Interface |
—— |
1 RS-422/RS-232 port (navigation output)
1 RS-232 port (differential input) 1-channel PPS output |
|||