🚨 Industry Pain Points
Modern navigation and control systems often face several technical challenges:
- Unstable attitude data in high-dynamic environments
- Poor reliability of low-cost inertial sensors
- Drift errors affecting heading and positioning accuracy
- Limited performance in GPS-denied environments
- Slow response and low precision in motion measurement systems
- Lack of reliable orientation data for autonomous systems
These limitations directly affect system accuracy, stability, and operational safety.
⚙ Product Advantages
Our inertial measurement system is designed to overcome these challenges:
- ✔ High-precision MEMS Inertial Measurement Unit (IMU)
- ✔ Proprietary attitude and heading algorithms
- ✔ Advanced complementary filtering technology
- ✔ Accurate pitch, roll, and relative heading calculation
- ✔ Stable performance in dynamic and vibration environments
- ✔ Real-time output of angular rate, acceleration, and attitude data
- ✔ High reliability and low drift performance
- ✔ Compact design and easy system integration
🚁 Product Applications
This inertial measurement system is widely used in:
- UAV navigation and flight control systems
- Autonomous vehicles and robotics
- Marine navigation systems
- Industrial automation and control systems
- Antenna stabilization platforms
- Surveying and mapping equipment
- Vehicle positioning and orientation systems
- Motion tracking and measurement applications
⭐ Why Choose Us
- Proprietary algorithm with independent intellectual property
- High reliability in dynamic environments
- Professional-grade performance with compact design
- Easy integration with various control systems
- Stable and accurate real-time data output
- Extensive experience in navigation and control applications
We provide high-performance inertial measurement solutions designed for professional navigation, control, and positioning systems.
❓ Frequently Asked Questions (FAQ)
Q1: What data does the system output?
The system outputs angular rate, acceleration, pitch angle, roll angle, and relative heading information.
Q2: Can it work without GPS?
Yes, the system can operate independently and provide stable attitude data without GPS.
Q3: Is it suitable for dynamic environments?
Yes, it is designed to provide stable performance in high-dynamic and vibration environments.
Q4: What are the main application fields?
Navigation, control, measurement, positioning, and orientation systems.
Q5: Is customization available?
Yes, customization and integration support are available based on project requirements.
| Parameter | unit | fundamental form | |
| Course angle drift (initial value 0°, RMS) | ° /h | 20 | |
| Roll angle accuracy / Yaw angle accuracy (RMS) | ° | Static: 0.1 | |
| ° | Dynamic: 0.2 | ||
|
gyroscope |
measuring range | ° /s | ±480 |
| Zero offset stability (10-second smoothing, 1σ, room temperature) | ° /h | 3 | |
| Full-temperature zero-drift variation (10-second smoothing, RMS, variable temperature) | ° /h | 20 | |
| Zero bias repeatability | ° /h | 5 | |
| random walk | ° / √ h | 0.15 | |
| tape width | Hz | 250 | |
| Nonlinear scaling factor | ppm | 100 | |
| Scale factor repeatability | ppm | 100 | |
| cross coupling | % | 0.1 | |
|
accelerometer |
measuring range | g | ±20 |
| Zero offset stability (10-second smoothing, 1σ, room temperature) | mg | 0.25 | |
| Full-temperature zero-drift variation (10-second smoothing, RMS, variable temperature) | mg | 2 | |
| Zero bias repeatability | mg | 0.5 | |
| tape width | Hz | 200 | |
| Scale factor repeatability | ppm | 500 | |
| cross coupling | % | 0.1 | |
| Data update rate | Hz | 500 (customizable) | |
| voltage | V | 3.3±0.33 | |
| power dissipation | W | ≤ 1.5 | |
| working temperature | ℃ | -45~85 | |
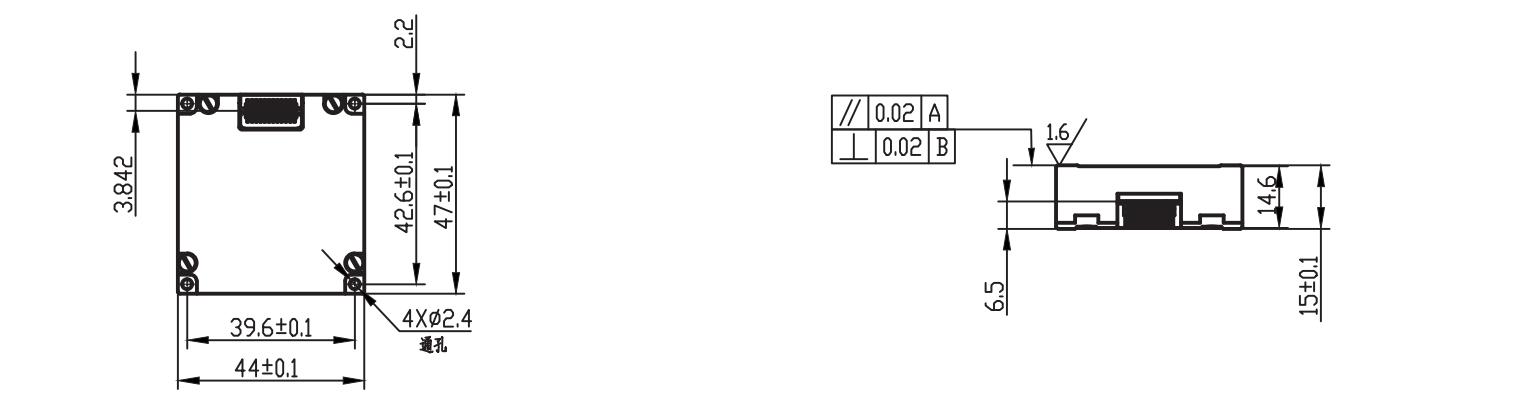
| size | mm | 44*47*15 | |
| weight | g | ≤ 50 | |
| Interface | —— | TTL | |