🚨 Industry Pain Points
In modern navigation and orientation systems, users often face the following challenges:
- Magnetic interference affecting heading accuracy
- Sensor drift caused by temperature variation
- Low precision in dynamic motion environments
- Difficult calibration processes in real-world deployment
- Limited output flexibility for different system integrations
These issues can significantly reduce the reliability of geomagnetic-based navigation systems.
⚙ Product Advantages
This geomagnetic orientation module is designed to deliver stable and accurate performance under complex conditions:
- ✔ Integrated tri-axis magnetometer for precise geomagnetic detection
- ✔ Tri-axis accelerometer for improved attitude compensation
- ✔ Built-in temperature sensor for full-range thermal compensation
- ✔ High-precision turntable calibration ensures superior accuracy
- ✔ On-site magnetometer calibration for real environment adaptability
- ✔ Supports multiple baud rates for flexible communication
- ✔ Multiple output modes for easy system integration
- ✔ Strong anti-interference capability for stable heading output
🧭 Product Applications
This sensor is widely used in geomagnetic navigation and orientation measurement systems, including:
- UAV heading and attitude determination
- Robotics navigation systems
- Marine navigation and compass systems
- Autonomous vehicle orientation
- Surveying and mapping equipment
- Industrial motion and position control systems
⭐ Why Choose Us
- High-precision geomagnetic sensing technology
- Strong temperature stability across full operating range
- Flexible integration with multiple platforms
- Reliable performance in complex electromagnetic environments
- Factory-calibrated with advanced turntable calibration system
- Designed for industrial-grade navigation applications
We provide stable, accurate, and easy-to-integrate orientation solutions for demanding navigation systems.
❓ Frequently Asked Questions (FAQ)
Q1: What sensors are integrated into this product?
It includes a tri-axis magnetometer, tri-axis accelerometer, and temperature sensor.
Q2: Does it support temperature compensation?
Yes, it features full-range temperature compensation for stable accuracy.
Q3: Can it be calibrated on-site?
Yes, it supports on-site magnetometer calibration for real-world environments.
Q4: What output formats are supported?
It supports multiple baud rates and various output modes for flexible integration.
Q5: What is the main application of this sensor?
It is mainly used for geomagnetic heading measurement and orientation systems.
| Parameter | unit | fundamental form | |||
|
azimuth |
measuring range | ° | 0~360 | ||
|
Static measurement accuracy |
After magnetic field spatial calibration | ° | 0.5 (–65°C ≤ tilt angle ≤ 65°) | ||
| 0.2 (horizontal) | |||||
| After horizontal calibration | ° | 0.2 (horizontal) | |||
| resolution ratio | ° | 0.01 | |||
| repetitiveness | ° | 0.05 | |||
|
angle of roll |
measuring range | angle of pitch | ° | -90~90 | |
| Roll angle | ° | -180~180 | |||
| accuracy | angle of pitch | ° | 0.1(-80° ~80°) | ||
| Roll angle | ° | 0.1(-65° ~65°) | |||
| resolution ratio | ° | 0.01 | |||
| repetitiveness | ° | 0.05 | |||
|
magnetometer |
measuring range | uT | ±125 | ||
| resolution ratio | uT | 0.015 | |||
| repetitiveness | uT | ±0.1 | |||
| temperature sensor | measuring range | ℃ | -40~85 | ||
| accuracy | ℃ | ±5 | |||
| Data update rate | Hz | 100 | |||
| voltage | V | DC3.6~20 | |||
| Current | work pattern | mA | 12 | ||
| Hibernation Mode | uA | 300 | |||
| Baud rate | —— | 300~921600 | |||
| working temperature | ℃ | -40~85 | |||
| storage temperature | ℃ | -40~85 | |||
| weight | g | 7 | |||
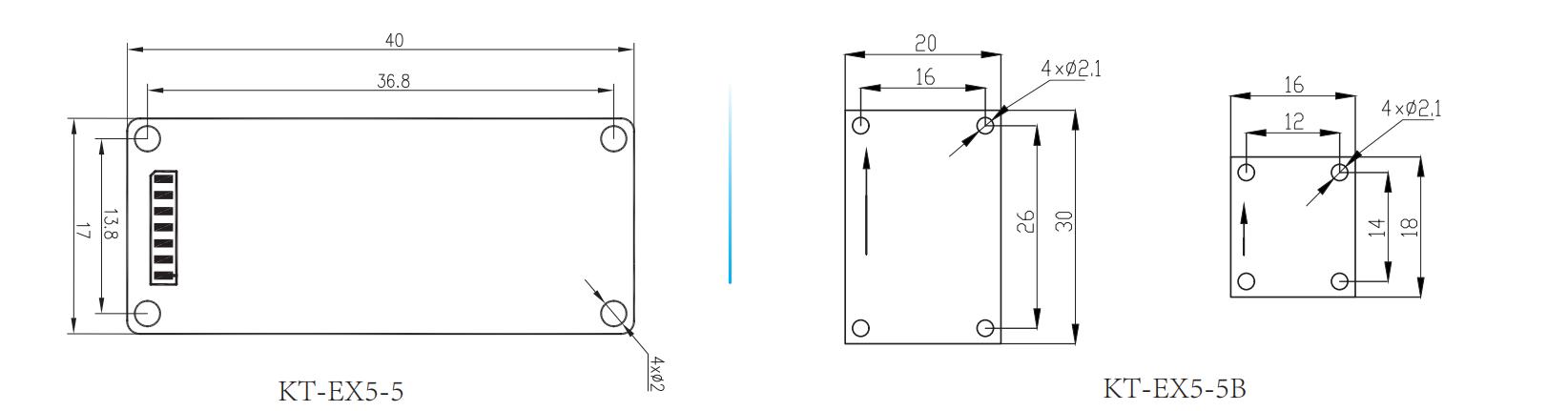
| Size (excluding the casing) | mm | 17*40*13 | 30*20——18*16 | ||
| CI | —— | TTL/RS-232/RS-422/RS-485 | |||