🚨 Industry Pain Points
Traditional heading and orientation systems face several limitations in complex environments:
- Magnetic compasses are easily affected by electromagnetic interference
- GPS-based heading systems fail in GPS-denied environments
- Mechanical gyro systems are bulky, expensive, and require frequent maintenance
- Low accuracy in static or low-dynamic conditions
- Poor reliability in industrial and military-grade applications
These limitations make accurate and stable north finding difficult in critical navigation and control systems.
⚙ Product Advantages
This MEMS North Seeking System is designed to overcome these challenges with advanced technology:
- ✔ High-precision MEMS gyro compass for accurate north finding
- ✔ Dual-axis MEMS accelerometer ensures stable attitude compensation
- ✔ High-accuracy motor servo system improves directional stability
- ✔ Fully autonomous north seeking based on Earth rotation sensing
- ✔ No dependence on magnetic field or external signals
- ✔ Strong anti-interference capability in complex electromagnetic environments
- ✔ Stable static north output aligned with device housing reference direction
🚀 Product Applications
This North Seeking System is widely used in precision orientation and navigation fields:
- UAV and drone navigation systems
- Missile and aerospace guidance systems
- Marine navigation and shipborne systems
- Vehicle-mounted inertial navigation systems
- Surveying and mapping equipment
- Industrial automation and robotic orientation systems
⭐ Why Choose Us
- True north determination without magnetic interference
- High-precision MEMS integration for stable performance
- Compact and lightweight system design
- Suitable for harsh and GPS-denied environments
- Reliable performance for military, aerospace, and industrial use
- Strong adaptability across multiple platform integrations
We deliver stable, high-accuracy inertial navigation solutions designed for mission-critical applications.
❓ Frequently Asked Questions (FAQ)
Q1: Does the system rely on magnetic fields?
No, it uses Earth rotation sensing and is completely independent of magnetic interference.
Q2: Can it work in GPS-denied environments?
Yes, it can operate fully without GPS support.
Q3: What is the main output of the system?
It outputs true north direction based on the device’s housing reference.
Q4: Is it suitable for UAV applications?
Yes, it is widely used in UAV and autonomous navigation systems.
Q5: What technology is used for north finding?
It uses MEMS gyroscopes to detect Earth’s rotation for autonomous north seeking.
| Parameter | unit | fundamental form |
|
North-seeking Precision |
° |
0.2° × sec (L) (1σ; where L is the local latitude)
No binding latitude required within an inclination of ±5°; binding latitude is required for large inclinations. |
|
Time of Seeking the North |
° |
<180 (Shanghai Electric initialization: 15s; single north-seeking time: 160s) |
|
The tilt angle of the mounting surface (pitch and roll) |
° |
±20 |
|
Attitude accuracy (pitch and roll) |
° |
0.05 |
|
voltage |
V |
9~24 |
|
steady state power consumption |
W |
≤ 2 |
|
working temperature |
℃ |
-20~80 |
|
storage temperature |
℃ |
-20~80 |
|
weight |
g |
290 |
|
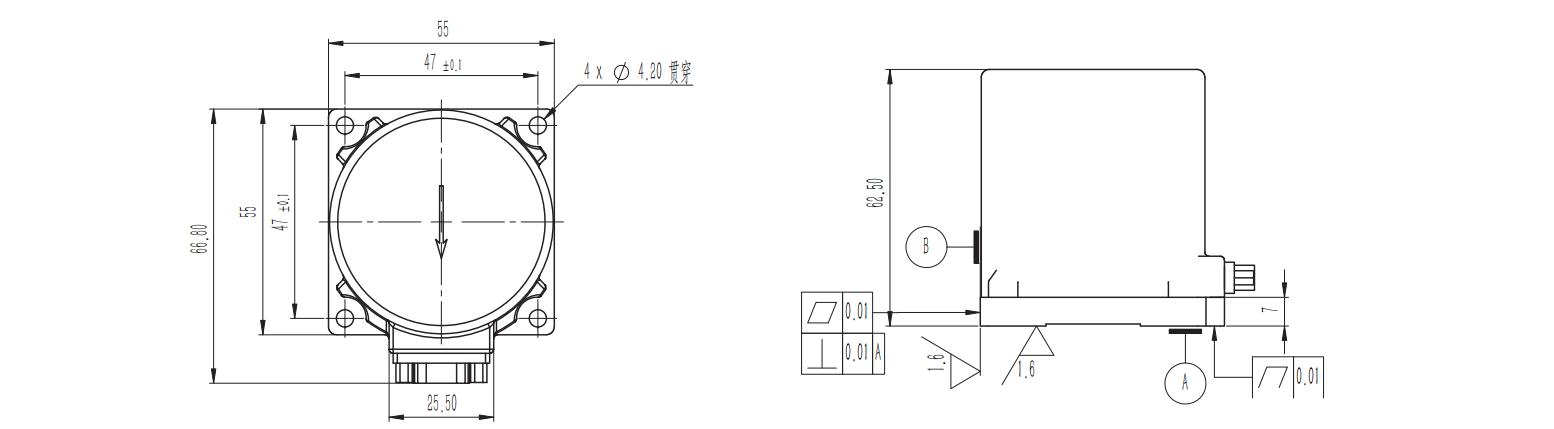
size |
mm |
55*66.8*62.5 |
|
Interface |
—— |
RS-422 |