🚨 Industry Pain Points
In industrial navigation, UAV systems, and high-precision motion sensing applications, users commonly face several challenges:
- Sensor drift caused by temperature variation
- Measurement errors due to installation misalignment
- Nonlinear output under dynamic motion conditions
- Poor stability in harsh environments (vibration, shock, temperature extremes)
- High integration cost when replacing legacy IMU systems
- Lack of drop-in compatibility with existing industrial platforms
These issues directly impact navigation accuracy, system stability, and operational reliability.
⚙ Product Advantages
This MEMS IMU is designed with advanced compensation and high-reliability architecture:
- ✔ Integrated MEMS gyroscope + MEMS accelerometer sensing core
- ✔ Built-in temperature sensor for full-temperature compensation
- ✔ Installation misalignment angle compensation for real-world mounting errors
- ✔ Nonlinear error correction algorithm for high-precision output
- ✔ Stable performance under static, dynamic, and harsh conditions
- ✔ Industrial-grade signal conditioning and embedded processing circuit
- ✔ Fully compatible drop-in replacement for ADIS16467 series
🚁 Product Applications
This IMU is widely used in high-precision motion and navigation systems, including:
- UAV flight control systems
- Robotics and autonomous vehicles
- Industrial navigation and positioning systems
- Stabilization platforms (gimbals, optical payloads)
- Marine and aerospace inertial systems
- High-reliability measurement and control systems
⭐ Why Choose Us
- High-precision MEMS sensing architecture
- Advanced multi-dimensional error compensation algorithms
- Strong environmental adaptability (temperature, vibration, shock)
- Drop-in compatibility reduces system redesign cost
- Stable output performance in both static and dynamic scenarios
- Designed for industrial-grade reliability and long-term operation
We provide a reliable, accurate, and integration-friendly inertial sensing solution for demanding applications.
❓ Frequently Asked Questions (FAQ)
Q1: Is this IMU compatible with ADIS16467?
Yes, it is designed as a drop-in replacement for the ADIS16467 series.
Q2: Does it support harsh environments?
Yes, it maintains stable output under vibration, shock, and temperature variations.
Q3: Does it include temperature compensation?
Yes, it has built-in full-temperature compensation algorithms.
Q4: What kind of errors are compensated internally?
It includes temperature drift, installation misalignment, and nonlinear error compensation.
Q5: What systems can it be used in?
It is suitable for UAVs, robotics, navigation systems, and industrial motion control applications.
| Parameter | unit | fundamental form | |
| gyroscope | Measurement range (customizable) | ° /s | ±1000 |
| Zero-level offset | ° /h | 180 | |
| Zero-pitch instability (@ALLAN variance) | ° /h | 5 | |
| Zero offset stability (10-second smoothing, 1σ, room temperature) | ° /h | 25 | |
| Zero bias repeatability | ° /h | 20 | |
| Zero bias error across the entire temperature range | ° /h | 50 | |
| random walk | ° / √ h | 0.3 | |
| Zero-zero acceleration sensitivity | ° /h/g | 20 | |
| resolution ratio | ° /s | 0.01 | |
| Output noise (half-maximum) | ° /s | 0.4 | |
| tape width | Hz | 345 | |
| Nonlinear scaling factor | % | 100 | |
| Scale factor repeatability | % | 100 | |
| cross coupling | % | 0.2 | |
| Parameter | unit | I mould | |
| accelerometer | Measurement range (customizable) | g | ±16 |
| Zero-pitch instability (@ALLAN variance) | mg | 0.01 | |
| Zero offset stability (10-second smoothing, 1σ, room temperature) | mg | 0.2 | |
| Zero bias repeatability | mg | 0.2 | |
| Zero bias error across the entire temperature range | mg | 1 | |
| random walk | m/s/ √ h | 0.03 | |
| resolution ratio | mg | 0.1 | |
| tape width | Hz | ≥ 200 | |
| Scale factor repeatability | ppm | 500 | |
| cross coupling | % | 0.2 | |
| Parameter | unit | fundamental form | |
|
other |
Stabilization start time | s | 1 |
| Data update rate | Hz | 2000 | |
| voltage | V | 5±0.5 | |
| steady state power consumption | W | < 0.5 | |
| ripple wave | mV | 100 | |
| working temperature | ℃ | -45~85 | |
| storage temperature | ℃ | -55~105 | |
| weight | g | 15 | |
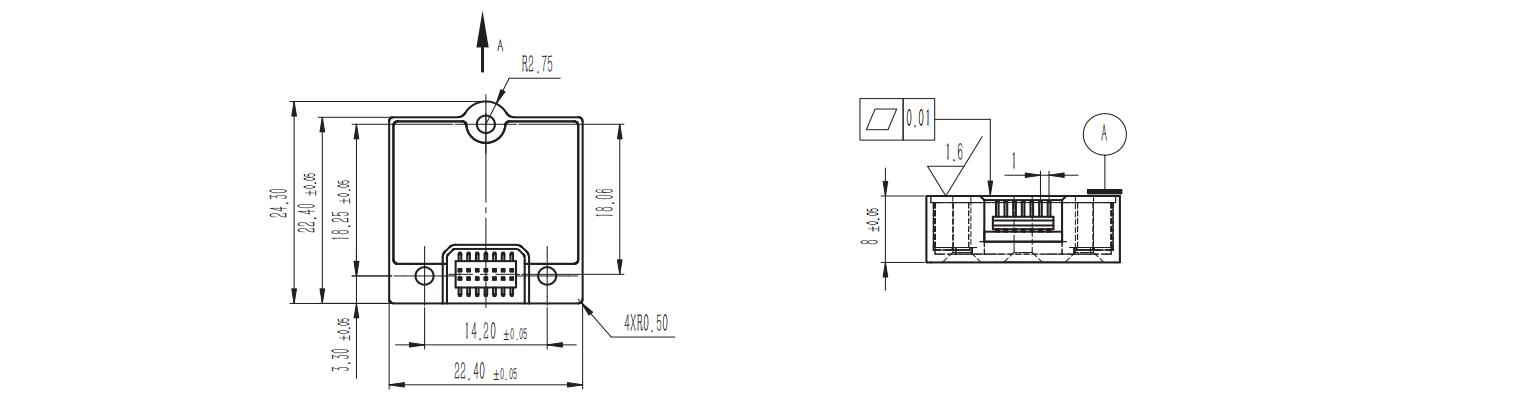
| size | mm | 22.4×24.3×8 | |
| Interface | —— | RS-422/SPI | |